Newbury, Rhys,
Gu, Morris,
Chumbley, Lachlan,
Mousavian, Arsalan,
Eppner, Clemens,
Leitner, Jürgen,
Bohg, Jeannette,
Morales, Antonio,
Asfour, Tamim,
Kragic, Danica,
Fox, Dieter,
and Cosgun, Akansel
IEEE Transactions on Robotics
2023
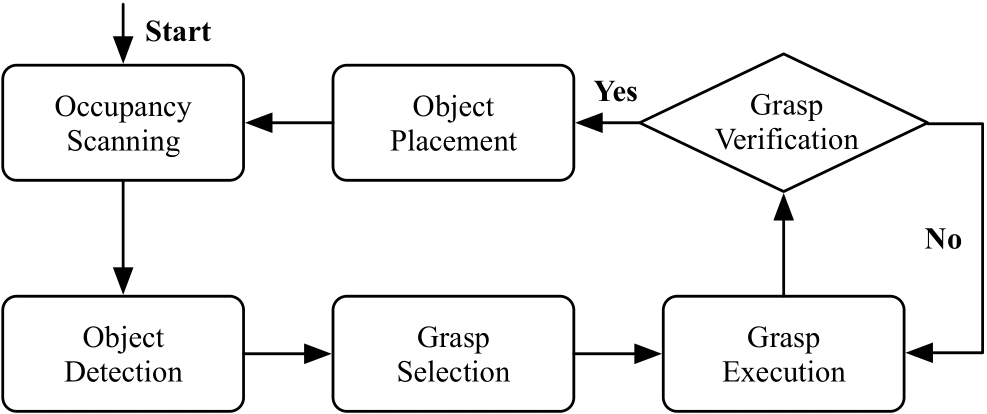
This article surveys the literature on 6 degrees of freedom (6-DoF) Grasping using deep learning. We focus our review on robotic grasping in table-top scenarios, where the robot requires all 6 degrees of freedom of the end-effector pose to pick objects from the table successfully. Our review found the following ive approaches most prevalent in literature:sampling based approaches, direct regression, using shape-completion, reinforcement learning or considering semantics. We structure over review around these common methodologies, exploring the current research behind each approach. We report a list of the quantitative metrics commonly used to assess the success of the grasping tasks, while we also review the current object sets, datasets and sensor modalities used in the deep-learning methods. We then discuss the findings of our reviews and make recommendations on the future directions for the field hoping to mitigate some of the current issues which exist in this field.
 In 2022 19th Conference on Robots and Vision (CRV) 2022
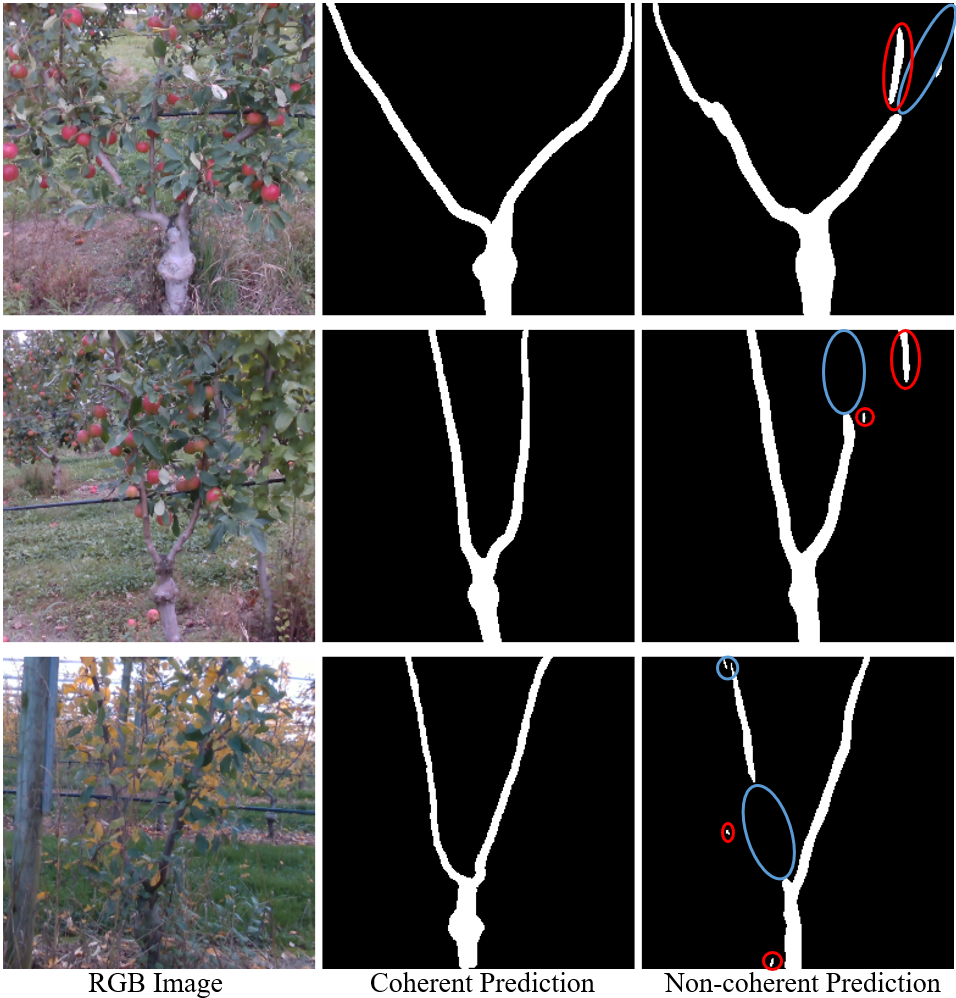
In 2022 19th Conference on Robots and Vision (CRV) 2022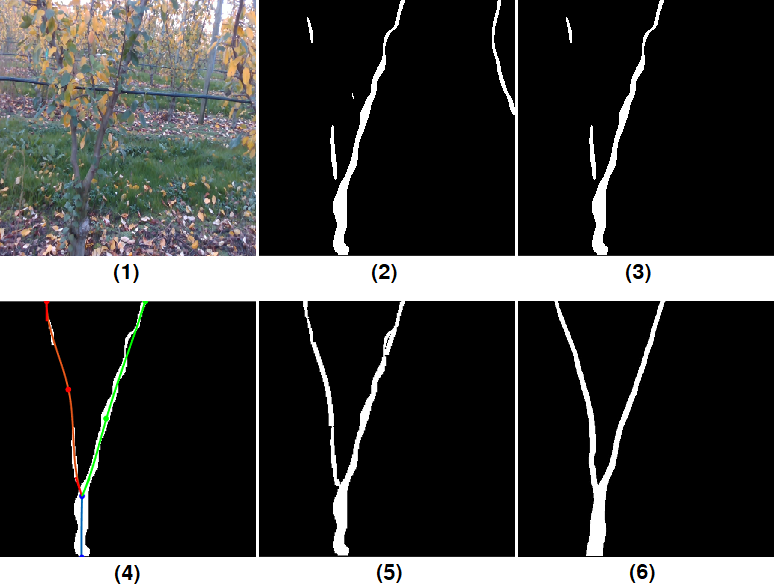 Computers and Electronics in Agriculture 2022
Computers and Electronics in Agriculture 2022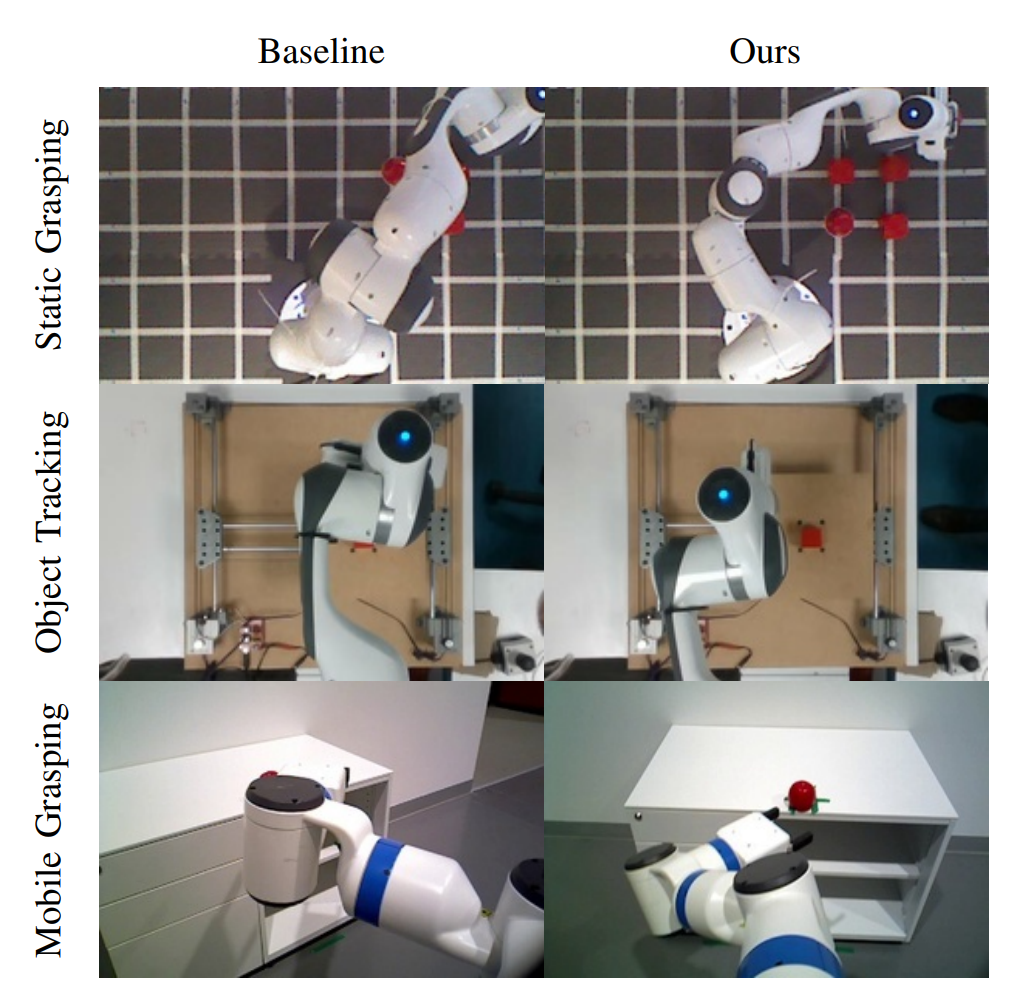

 Computers and Electronics in Agriculture 2021
Computers and Electronics in Agriculture 2021 IEEE Robotics and Automation Letters 2021
IEEE Robotics and Automation Letters 2021 IEEE Robotics and Automation Letters 2021
IEEE Robotics and Automation Letters 2021
 Cartography and Geographic Information Science 2021
Cartography and Geographic Information Science 2021