Visibility Maximization Controller for Robotic Manipulation
Authors: Kerry He, Rhys Newbury, Tin Tran, Jesse Haviland, Ben Burgess-Limerick, Dana Kulić, Peter Corke and Akansel Cosgun
Publication IEEE Robotic and Automation Letters
If you find our work useful, please cite us.
@article{vmc2022,
title = {Visibility Maximization Controller for Robotic Manipulation},
author = {He, Kerry and Newbury, Rhys and Tran, Tin and Haviland, Jesse and Burgess-Limerick, Ben and Kulić, Dana and Corke, Peter and Cosgun, Akansel},
year = {2022},
journal = {IEEE Robotics and Automation Letters},
volume = {7},
number = {3},
pages = {8479-8486},
doi = {10.1109/LRA.2022.3188430}
}
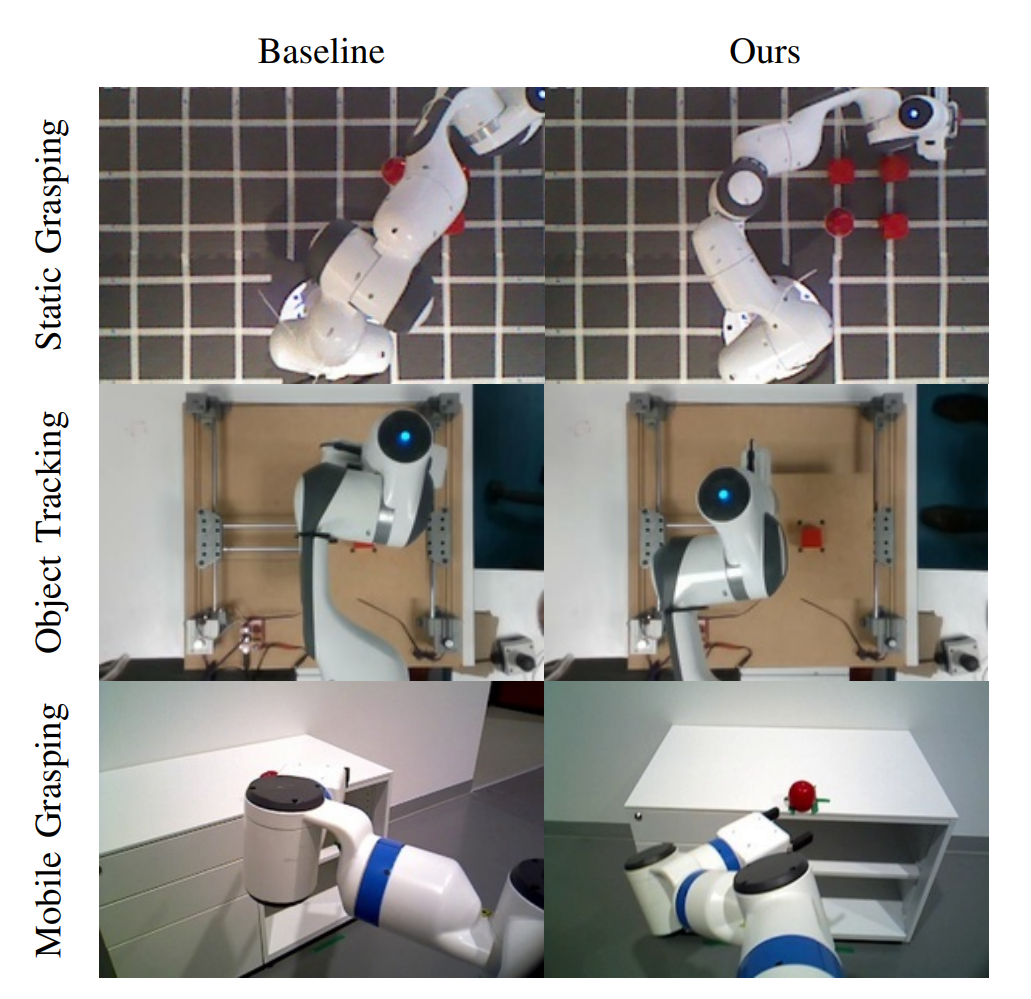
Abstract Occlusions caused by a robot’s own body is a common problem for closed-loop control methods employed in eye-to-hand camera setups. We propose an optimization-based reactive controller that minimizes self-occlusions while achieving a desired goal pose. The approach allows coordinated control between the robot’s base, arm and head by encoding the line-of-sight visibility to the target as a soft constraint along with other task-related constraints and solving for feasible joint and base velocities. The generalizability of the approach is demonstrated in simulated and real-world experiments, on robots with fixed or mobile bases, with moving or fixed objects, and multiple objects. The experiments revealed a trade-off between occlusion rates and other task metrics. While a planning-based baseline achieved lower occlusion rates than the proposed controller, it came at the expense of highly inefficient paths and a significant drop in the task success. On the other hand, the proposed controller is shown to improve visibility to the line target object(s) without sacrificing too much from the task success and efficiency.
Video
Mobile Manipulation using VMC
import swift
import spatialgeometry as sg
import roboticstoolbox as rtb
import spatialmath as sm
import numpy as np
import qpsolvers as qp
import math
def transform_between_vectors(a, b):
# Finds the shortest rotation between two vectors using angle-axis,
# then outputs it as a 4x4 transformation matrix
a = a / np.linalg.norm(a)
b = b / np.linalg.norm(b)
angle = np.arccos(np.dot(a, b))
axis = np.cross(a, b)
return sm.SE3.AngleAxis(angle, axis)
# Launch the simulator Swift
env = swift.Swift()
env.launch()
# Create a Fetch and Camera robot object
fetch = rtb.models.Fetch()
fetch_camera = rtb.models.FetchCamera()
# Set joint angles to ready configuration
fetch.q = fetch.qr
fetch_camera.q = fetch_camera.qr
# Make target object obstacles with velocities
target = sg.Sphere(radius=0.05, base=sm.SE3(-2.0, 0.0, 0.5))
# Make line of sight object to visualize where the camera is looking
sight_base = sm.SE3.Ry(np.pi / 2) * sm.SE3(0.0, 0.0, 2.5)
centroid_sight = sg.Cylinder(
radius=0.001,
length=5.0,
base=fetch_camera.fkine(fetch_camera.q, fast=True) @ sight_base.A,
)
# Add the Fetch and other shapes to the simulator
env.add(fetch)
env.add(fetch_camera)
env.add(centroid_sight)
env.add(target)
# Set the desired end-effector pose to the location of target
Tep = fetch.fkine(fetch.q)
Tep.A[:3, :3] = sm.SE3.Rz(np.pi).R
Tep.A[:3, 3] = target.base.t
env.step()
n_base = 2
n_arm = 8
n_camera = 2
n = n_base + n_arm + n_camera
def step():
# Find end-effector pose in world frame
wTe = fetch.fkine(fetch.q, fast=True)
# Find camera pose in world frame
wTc = fetch_camera.fkine(fetch_camera.q, fast=True)
# Find transform between end-effector and goal
eTep = np.linalg.inv(wTe) @ Tep.A
# Find transform between camera and goal
cTep = np.linalg.inv(wTc) @ Tep.A
# Spatial error between end-effector and target
et = np.sum(np.abs(eTep[:3, -1]))
# Weighting function used for objective function
def w_lambda(et, alpha, gamma):
return alpha * np.power(et, gamma)
# Quadratic component of objective function
Q = np.eye(n + 10)
Q[: n_base + n_arm, : n_base + n_arm] *= 0.01 # Robotic manipulator
Q[:n_base, :n_base] *= w_lambda(et, 1.0, -1.0) # Mobile base
Q[n_base + n_arm : n, n_base + n_arm : n] *= 0.01 # Camera
Q[n : n + 3, n : n + 3] *= w_lambda(et, 1000.0, -2.0) # Slack arm linear
Q[n + 3 : n + 6, n + 3 : n + 6] *= w_lambda(et, 0.01, -5.0) # Slack arm angular
Q[n + 6:-1, n + 6:-1] *= 100 # Slack camera
Q[-1, -1] *= w_lambda(et, 1000.0, 3.0) # Slack self-occlusion
# Calculate target velocities for end-effector to reach target
v_manip, _ = rtb.p_servo(wTe, Tep, 1.5)
v_manip[3:] *= 1.3
# Calculate target angular velocity for camera to rotate towards target
head_rotation = transform_between_vectors(
np.array([1, 0, 0]), cTep[:3, 3]
)
v_camera, _ = rtb.p_servo(sm.SE3(), head_rotation, 25)
# The equality contraints to achieve velocity targets
Aeq = np.c_[
fetch.jacobe(fetch.q, fast=True),
np.zeros((6, 2)),
np.eye(6),
np.zeros((6, 4))
]
beq = v_manip.reshape((6,))
jacobe_cam = fetch_camera.jacobe(fetch_camera.q, fast=True)[3:, :]
Aeq_cam = np.c_[
jacobe_cam[:, :3],
np.zeros((3, 7)),
jacobe_cam[:, 3:],
np.zeros((3, 6)),
np.eye(3),
np.zeros((3, 1)),
]
Aeq = np.r_[Aeq, Aeq_cam]
beq = np.r_[beq, v_camera[3:].reshape((3,))]
# The inequality constraints for joint limit avoidance
Ain = np.zeros((n + 10, n + 10))
bin = np.zeros(n + 10)
# The minimum angle (in radians) in which the joint is allowed to approach
# to its limit
ps = 0.1
# The influence angle (in radians) in which the velocity damper
# becomes active
pi = 0.9
# Form the joint limit velocity damper
Ain[: fetch.n, : fetch.n], bin[: fetch.n] = fetch.joint_velocity_damper(
ps, pi, fetch.n
)
Ain_torso, bin_torso = fetch_camera.joint_velocity_damper(0.0, 0.05, fetch_camera.n)
Ain[2, 2] = Ain_torso[2, 2]
bin[2] = bin_torso[2]
Ain_cam, bin_cam = fetch_camera.joint_velocity_damper(ps, pi, fetch_camera.n)
Ain[n_base + n_arm : n, n_base + n_arm : n] = Ain_cam[3:, 3:]
bin[n_base + n_arm : n] = bin_cam[3:]
# Create line of sight object between camera and object
c_Ain, c_bin, _ = fetch.vision_collision_damper(
target,
camera=fetch_camera,
camera_n=2,
q=fetch.q[: fetch.n],
di=0.3,
ds=0.2,
xi=1.0,
end=fetch.link_dict["gripper_link"],
start=fetch.link_dict["shoulder_pan_link"],
)
if c_Ain is not None and c_bin is not None:
c_Ain = np.c_[c_Ain, np.zeros((c_Ain.shape[0], 9)), -np.ones((c_Ain.shape[0], 1))]
Ain = np.r_[Ain, c_Ain]
bin = np.r_[bin, c_bin]
# Linear component of objective function: the manipulability Jacobian
c = np.concatenate(
(
np.zeros(n_base),
-fetch.jacobm(start=fetch.links[3]).reshape((n_arm,)),
np.zeros(n_camera),
np.zeros(10),
)
)
# Get base to face end-effector
kε = 0.5
bTe = fetch.fkine(fetch.q, include_base=False, fast=True)
θε = math.atan2(bTe[1, -1], bTe[0, -1])
ε = kε * θε
c[0] = -ε
# The lower and upper bounds on the joint velocity and slack variable
lb = -np.r_[
fetch.qdlim[: fetch.n],
fetch_camera.qdlim[3 : fetch_camera.n],
100 * np.ones(9),
0,
]
ub = np.r_[
fetch.qdlim[: fetch.n],
fetch_camera.qdlim[3 : fetch_camera.n],
100 * np.ones(9),
100,
]
# Solve for the joint velocities dq
qd = qp.solve_qp(Q, c, Ain, bin, Aeq, beq, lb=lb, ub=ub)
qd_cam = np.concatenate((qd[:3], qd[fetch.n : fetch.n + 2]))
qd = qd[: fetch.n]
if et > 0.5:
qd *= 0.7 / et
qd_cam *= 0.7 / et
else:
qd *= 1.4
qd_cam *= 1.4
arrived = et < 0.02
fetch.qd = qd
fetch_camera.qd = qd_cam
centroid_sight._base = fetch_camera.fkine(fetch_camera.q, fast=True) @ sight_base.A
return arrived
arrived = False
while not arrived:
arrived = step()
env.step(0.01)
Acknowledgments